บทความจะถูกเผยแพร่ตามที่ได้รับ สำหรับการจัดทำเฉพาะเรื่อง
ค้นหาใช้บล็อก
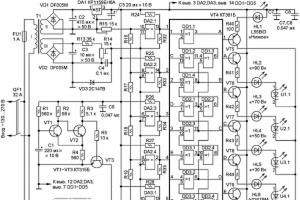
ในการฝึกวิทยุสมัครเล่น ตัวบ่งชี้เรโซแนนซ์แบบเฮเทอโรไดน์ - GIR - มักใช้ในการวัดความถี่เรโซแนนซ์ของระบบการสั่นแบบพาสซีฟ โดยจะรวมเครื่องวัดคลื่นเรโซแนนซ์และเครื่องกำเนิดไฟฟ้าที่ปรับเทียบพลังงานต่ำเข้าด้วยกัน ความถี่วิทยุ วงจรออสซิลเลเตอร์ของเครื่องวัดคลื่น GIR ก็เป็นวงจรของออสซิลเลเตอร์ในพื้นที่เช่นกัน การใช้อุปกรณ์วัดดังกล่าวทำให้ง่ายต่อการกำหนดความถี่เรโซแนนซ์ของวงจรออสซิลเลเตอร์ ส่วนของสายเชื่อมต่อ และองค์ประกอบเสาอากาศของสถานีวิทยุคลื่นสั้น นอกจากนี้ GIR ยังสามารถใช้เป็นเครื่องกำเนิดสัญญาณได้อีกด้วย แผนผังของ GIR ที่เสนอจะแสดงในรูปที่ 1 1.
รูปที่ 1
ออสซิลเลเตอร์ในพื้นที่นั้นถูกสร้างขึ้นบนทรานซิสเตอร์เอฟเฟกต์สนาม VT1 ซึ่งเชื่อมต่อตามวงจรที่มีแหล่งกำเนิดร่วมกัน ทรานซิสเตอร์ดังกล่าวทำให้อุปกรณ์มีความเสถียรของความถี่มากกว่าทรานซิสเตอร์แบบไบโพลาร์อย่างมาก ไดโอด VD1 ซึ่งเชื่อมต่อกับเกตและขั้วต้นทางของทรานซิสเตอร์ช่วยปรับปรุงรูปร่างของแรงดันไฟฟ้าที่สร้างขึ้นทำให้ใกล้กับแรงดันไฟฟ้าไซน์มากขึ้น หากไม่มีไดโอดกระแสครึ่งคลื่นบวกของกระแสเดรนจะบิดเบี้ยวเนื่องจากการเพิ่มขึ้นของทรานซิสเตอร์ที่ได้รับเมื่อแรงดันเกตเพิ่มขึ้นซึ่งย่อมนำไปสู่การปรากฏตัวของฮาร์โมนิกในสเปกตรัมของสัญญาณออสซิลเลเตอร์ในพื้นที่อย่างหลีกเลี่ยงไม่ได้ ตัวต้านทาน R5 จะจำกัดกระแสเดรนของทรานซิสเตอร์เอฟเฟกต์สนาม
วงจรออสซิลเลเตอร์ของอุปกรณ์นั้นถูกสร้างขึ้นโดยคอยล์ L1 ที่ถอดเปลี่ยนได้ซึ่งเชื่อมต่อกับตัวเชื่อมต่อ XI บล็อกของตัวเก็บประจุแบบแปรผัน C1 และตัวเก็บประจุ C2, SZ ที่เชื่อมต่อเป็นอนุกรม อุปกรณ์ถูกสลับให้ทำงานในช่วงการวัดหนึ่งในห้าช่วง (3...6, 6...10, 8...15, 13...25 และ 24...35 MHz) โดยการเปิดคอยล์ L1 ของการเหนี่ยวนำที่สอดคล้องกัน
ผ่านตัวเก็บประจุ C5 แรงดันไฟฟ้าความถี่วิทยุจะถูกส่งไปยังอินพุตของตัวบ่งชี้โวลต์มิเตอร์ความถี่สูงซึ่งประกอบด้วยเครื่องตรวจจับที่เชื่อมต่อไดโอด VD2 และ VD4 ตามวงจรแรงดันไฟฟ้าสองเท่าและเครื่องขยายเสียงกระแสตรงบนทรานซิสเตอร์ VT2 พร้อมไมโครแอมมิเตอร์ PA1 ในวงจรคอลเลคเตอร์ ไดโอด
VD3 จะรักษาแรงดันไฟฟ้าอ้างอิงบนไดโอด VD2, VD4 ซึ่งจะช่วยเพิ่มความไวของเครื่องตรวจจับและความเสถียรของเครื่องขยายเสียง ตัวต้านทานแบบปรับค่าได้ R3 เมื่อรวมกับสวิตช์เปิด/ปิด SA1 จะตั้งค่าลูกศรไมโครแอมมิเตอร์ PA1 ไปที่ตำแหน่งเดิม Choke L2 เป็นองค์ประกอบที่แยกออสซิลเลเตอร์เฉพาะที่ออกจากแหล่งพลังงานที่ความถี่สูง
แหล่งพลังงานของอุปกรณ์อาจเป็นแบตเตอรี่ในตัวที่มีแรงดันไฟฟ้า 3....9 V (ควรให้ความสำคัญกับแบตเตอรี่ Korund หรือแบตเตอรี่ 7D-0.1) หรือแหล่งจ่ายไฟหลักภายนอกที่มีเอาต์พุตเดียวกัน แรงดันไฟฟ้า.
GIR ที่อธิบายไว้ไม่มีตัวปรับแรงดันไฟฟ้าเพิ่มเติมดังนั้นเมื่อใช้งานจึงจำเป็นต้องใช้แหล่งกำเนิดที่มีค่าแรงดันคงที่เท่ากันของกระแสอื่น
ลักษณะของอุปกรณ์จะแสดงอยู่ในชื่อบทความและการติดตั้งชิ้นส่วนในตัวเครื่องจะแสดงในรูปที่ 2

รูปที่ 2
ตัวเครื่องเป็นกล่องทองเหลืองชุบโครเมียม ขนาด 120x70x45 มม. มีฝาปิดมิดชิด บล็อกของตัวเก็บประจุแบบแปรผัน C1, ตัวบ่งชี้ PA1 และตัวต้านทานแบบแปรผัน R3 อยู่ที่ผนังด้านหน้าของเคส ตัวเก็บประจุ C2 และ SZ ติดตั้งโดยตรงบนเทอร์มินัลของส่วนบล็อก KPI และบนซ็อกเก็ตของขั้วต่อ XI ชิ้นส่วนที่เหลือยกเว้นแบตเตอรี่กำลังติดตั้งบนแผงวงจรพิมพ์ (รูปที่ 3)

รูปที่ 3
ทำจากไฟเบอร์กลาสฟอยล์
หน่วย KPE ที่ใช้ใน GIR มาจากเครื่องรับวิทยุขนาดเล็ก “Sel-ga” ตัวเก็บประจุ C2 และ SZ คือ KSO-1, C5 คือ KD, C9 และ C10 คือออกไซด์ K52-1B ส่วนที่เหลือคือ KM-5 ตัวต้านทานคงที่ทั้งหมดเป็นแบบ MLT, ตัวแปร R3 พร้อมสวิตช์ไฟ SA1 - SPZ-4vM สามารถเปลี่ยนไดโอด KD512A (VD1), KD521B (VD3) ด้วยไดโอดซิลิคอนความถี่สูงอื่น ๆ เช่น KD509A และไดโอดเจอร์เมเนียม D9A (VD2 และ VD4) ด้วย D18, D20 หรือ GD508
ไมโครแอมมิเตอร์ RA1 สำหรับกระแสโก่งเต็มที่ของเข็มขนาด 500 μA คุณสามารถติดตั้งเครื่องบันทึกเทปในครัวเรือนได้ เช่น พิมพ์ M4762
Choke L2 พันบนวงแหวนขนาดมาตรฐาน K7x4x2 ที่ทำจากเฟอร์ไรต์ 1000NM และมีลวด PEV-2 0.12 จำนวน 150 รอบ คอยล์โช้คสำเร็จรูปเคลือบด้วยกาวซุปเปอร์ซีเมนต์
ข้อมูลการพันของขดลวดรูปร่างของช่วงการวัดทั้งห้าช่วงจะแสดงอยู่ในตาราง เฟรมของคอยล์ของสามช่วงแรกอาจเป็นฉนวนโพลีเอทิลีนของสายโคแอกเซียล RK-106 วงล้อของสองช่วงสุดท้ายไม่มีกรอบ ขอแนะนำให้พันขดลวด 24...35 MHz ด้วยลวดทองแดงชุบเงินขนาดเส้นผ่านศูนย์กลาง 1 มม.
| ช่วงเมกะเฮิร์ตซ์ | คอยล์ L1 | ||
| ตัวเลข เปลี่ยน |
ลวด | ภายใน เส้นผ่านศูนย์กลาง มม |
|
| 3...6 6...10 8...15 13...25 24...35 |
30 25 22 19 9 |
พีอีวี-2 0.33 พีอีวี-2 0.47 พีอีวี-2 0.68 พีอีวี-2 1.28 พีอีวี-2 1.28 |
13 13 13 14 14 |
ตามโครงสร้าง คอยล์แต่ละวงจะถูกวางไว้ในตัวเรือนคาร์โบไลต์จากตัวสะท้อนควอทซ์ (รูปที่ 4)

รูปที่ 4
ระหว่างฐานของตัวเรือนและฝาครอบป้องกันจะมีมุมโค้งงอจากอลูมิเนียมบาง ๆ ซึ่งมีการติดสเกลของช่วงการวัดที่สอดคล้องกัน เป็นไปไม่ได้ที่จะสร้างสเกลทั่วไปหนึ่งอันสำหรับทุกช่วง - ด้วยความหนาแน่นของการปรับจูนที่แตกต่างกันของวงจรที่ใช้จะทำให้การใช้อุปกรณ์ซับซ้อนขึ้น
ที่ผนังด้านท้ายของเคสจะมีที่ยึดควอตซ์แบบสองซ็อกเก็ตซึ่งสอดหมุดของคอยล์ห่วงเข้าไป ในกรณีนี้ สเกลจะปรากฏใต้ที่จับของบล็อก KPI พร้อมด้วยลูกศรดัชนี
การติดตั้งวงจรความถี่สูงและการเชื่อมต่อทำด้วยลวดทองแดงชุบเงินขนาดเส้นผ่านศูนย์กลาง 1 มม. วงจรความถี่ต่ำด้วยลวด MGShV
การสร้าง GIR เริ่มต้นด้วยการตรวจสอบความถูกต้องของการเชื่อมต่อทั้งหมดอย่างละเอียด จากนั้นขดลวดวนของช่วงการวัดใดๆ จะถูกเสียบเข้าไปในช่องเสียบของขั้วต่อ X1 และเปิดเครื่อง ในกรณีนี้ เข็มของไมโครแอมมิเตอร์ PA1 ควรเบี่ยงเบนไปจากเครื่องหมายศูนย์ การใช้ตัวต้านทานปรับค่าได้ R3 จะตั้งค่าไว้ที่เครื่องหมายทางขวาสุดของมาตราส่วน จากนั้น หมุนปุ่มของบล็อก KPI จากตำแหน่งสุดขั้วหนึ่งไปยังอีกตำแหน่งหนึ่ง สังเกตการเคลื่อนไหวเล็กน้อยของเข็มเครื่องมือ ด้วยความจุขั้นต่ำของ KPI ลูกศรควรเบี่ยงเบนไปทางขวามากขึ้นซึ่งอธิบายได้จากการเพิ่มปัจจัยด้านคุณภาพของวงจรเมื่อความถี่ของเครื่องกำเนิดไฟฟ้าเพิ่มขึ้น
สเกลของช่วงการวัดทั้งหมดได้รับการสอบเทียบโดยใช้เครื่องรับที่ปรับเทียบแล้ว เช่น
หากจำเป็นต้องเพิ่มความแม่นยำของสเกลในบางส่วนของช่วงให้เชื่อมต่อตัวเก็บประจุไมก้าที่มีความจุคงที่ขนานกับขดลวด ความเหนี่ยวนำของขดลวดลูปและความจุของลูปโดยคำนึงถึงตัวเก็บประจุเพิ่มเติมสามารถคำนวณได้โดยใช้สูตร
โดยที่ C อยู่ในพิโกฟารัด L อยู่ในไมโครเฮนรี f อยู่ในเมกะเฮิรตซ์
เมื่อพิจารณาความถี่เรโซแนนซ์ของวงจรที่กำลังศึกษา ให้นำขดลวด GIR เข้ามาใกล้ที่สุดเท่าที่จะเป็นไปได้ และหมุนปุ่มของบล็อก KPI ช้าๆ ตรวจดูการอ่านตัวบ่งชี้ ทันทีที่ลูกศรแกว่งไปทางซ้าย ให้สังเกตตำแหน่งที่สอดคล้องกันของตัวชี้บนที่จับ KPI เมื่อหมุนปุ่มปรับเพิ่มเติม ลูกศรของแผงหน้าปัดจะกลับสู่ตำแหน่งเดิม เครื่องหมายบนสเกลที่สังเกต "การจุ่ม" สูงสุดของลูกศรจะสอดคล้องกับความถี่เรโซแนนซ์ของวงจรที่กำลังศึกษาอย่างแม่นยำ
ก. กวอซดิตสกี้
โดยเฉพาะอย่างยิ่งจะใช้เมื่อติดตั้งเสาอากาศ อย่างไรก็ตาม GIR เวอร์ชันคลาสสิกมุ่งเน้นไปที่การเชื่อมต่อแบบเหนี่ยวนำกับวงจรการสั่นที่วัดได้ ในกรณีส่วนใหญ่ ตัวเหนี่ยวนำขนาดเล็กไม่อนุญาตให้มีการเชื่อมต่อที่เพียงพอกับองค์ประกอบเสาอากาศ เช่น กับโครงลวด เป็นผลให้การระบุความถี่เรโซแนนซ์ขององค์ประกอบไม่ชัดเจน ซึ่งนำไปสู่ข้อผิดพลาดในการวัดอย่างมีนัยสำคัญ
เครื่องดำเนินการคลื่นสั้นภาษาอังกฤษ Peter Dodd (G3LDO) แก้ไขปัญหานี้ได้ง่ายๆ ด้วยการสร้าง GIR พิเศษแบบง่ายๆ เพื่อกำหนดค่าองค์ประกอบของ "ช่องสี่เหลี่ยมคู่" ของเขา มันแตกต่างจากรุ่นคลาสสิกของอุปกรณ์นี้เฉพาะในการออกแบบ (Peter Dodd. Antennas. - RadCom, 2008, March, p. 66,67)
ข้าว. 1 GIR สำหรับปรับเสาอากาศแบบลวด
การออกแบบวงจรของตัวบ่งชี้เรโซแนนซ์แบบเฮเทอโรไดน์สามารถเป็นอะไรก็ได้ - ส่วนมากได้รับการตีพิมพ์ในวรรณกรรมวิทยุสมัครเล่น Peter Dodd ใช้ GIR เวอร์ชันที่ง่ายที่สุดเวอร์ชันหนึ่ง แผนภาพแสดงไว้ในรูปที่ 1 1. การบ่งชี้ของการสั่นพ้องจะดำเนินการโดยการเปลี่ยนแปลงในแหล่งกระแสของทรานซิสเตอร์ VT1 และเพื่อให้การเปลี่ยนแปลงเหล่านี้เด่นชัดยิ่งขึ้นอุปกรณ์ตรวจวัด PA1 จึงใช้แรงดันไบแอส สามารถปรับได้ด้วยตัวต้านทานผันแปร R4 โดยการตั้งเข็มของอุปกรณ์ให้ใกล้กับจุดสิ้นสุดของสเกลก่อนเริ่มการวัด ความถี่เรโซแนนซ์จะถูกบันทึกด้วยเครื่องวัดความถี่ดิจิตอล จากทรานซิสเตอร์ในประเทศใน GIR นี้คุณสามารถใช้ตัวอย่างเช่นทรานซิสเตอร์ KP303V มิเตอร์ความถี่เชื่อมต่อกับขั้วต่อ XW1

ข้าว. 2 รูปถ่ายของอุปกรณ์
ความแตกต่างในการออกแบบจาก GIR เวอร์ชันดั้งเดิมคือผู้เขียนใช้คอยล์ขนาดใหญ่ซึ่งทำให้สามารถเชื่อมต่อกับองค์ประกอบเสาอากาศได้อย่างเห็นได้ชัดซึ่งต้องวัดความถี่เรโซแนนซ์ (ด้วยเฟรมหรือเครื่องสั่นเชิงเส้น) ลักษณะของอุปกรณ์ของเขาแสดงไว้ในรูปที่ 1 2. ฐานเป็นแผ่นอิเล็กทริกกว้าง 150 มม. และหนา 15 มม. ความยาวไม่สำคัญ ขึ้นอยู่กับขนาดของกล่องที่วางองค์ประกอบ GIR และขนาดของเครื่องวัดความถี่ ผู้เขียนใช้เครื่องวัดความถี่ที่ผลิตจากโรงงาน ที่ด้านบนของแผ่นนี้มีแผลคอยล์ซึ่งมีลวดห้าเส้นที่มีเส้นผ่านศูนย์กลาง 1 มม. เป็นฉนวน ค่าความเหนี่ยวนำอยู่ที่ประมาณ 3 μH ซึ่งทำให้มั่นใจว่า GIR ทับซ้อนกับ KPI ที่ใช้ตั้งแต่ 12 ถึง 22 MHz ด้วยการเปลี่ยนจำนวนรอบ คุณจะได้รับความถี่ที่ทับซ้อนกันซึ่งจำเป็นสำหรับการปรับเสาอากาศเฉพาะ ในส่วนบนของแผ่นจะมีตะขออิเล็กทริกสองตัว (ที่ใช้สำหรับยึดสายไฟ) ซึ่งอุปกรณ์จะแขวนอยู่บนองค์ประกอบลวดของเสาอากาศ ซึ่งช่วยให้คุณกำหนดตำแหน่งสัมพัทธ์ของคอยล์ GIR และองค์ประกอบนี้ได้ ซึ่งจะเพิ่มความแม่นยำในการวัดด้วย ส่วนหนึ่งขององค์ประกอบลวดเสาอากาศจะขนานกับด้านยาวของขดลวดสี่เหลี่ยม ดังที่การทดสอบแสดงให้เห็น ช่วยให้มั่นใจได้ถึงการเชื่อมต่อที่ค่อนข้างแน่นระหว่างขดลวด GIR และองค์ประกอบเสาอากาศ และการลงทะเบียนความถี่เรโซแนนซ์ที่เชื่อถือได้ ดังนั้น เมื่อทำงานกับเฟรม "สี่เหลี่ยมจัตุรัสคู่" การเปลี่ยนแปลงในการอ่านค่าของอุปกรณ์ตรวจวัดที่มีการสั่นพ้องจะอยู่ที่ประมาณ 40% ของสเกลทั้งหมด
คุณสมบัติของส่วนของเรา “เราแนะนำให้คุณทำซ้ำ...”อยู่ในความจริงที่ว่ามันเผยแพร่เนื้อหาตามประสบการณ์จริงในการทำซ้ำการออกแบบเฉพาะ แผนภาพและคำอธิบายซึ่งตีพิมพ์ก่อนหน้านี้ในวรรณกรรมวิทยุสมัครเล่น ตามกฎแล้วโครงสร้างที่เสร็จสมบูรณ์นั้นมีลักษณะที่เป็นประโยชน์อย่างแท้จริงนั่นคือ ผ่านการทดสอบโดยนักวิทยุสมัครเล่น มีรูปถ่ายและคำแนะนำที่เป็นประโยชน์ ซึ่งเป็นประโยชน์อย่างยิ่งสำหรับมือใหม่หัดเล่นวิทยุ
ครั้งนี้เรานำเสนอการออกแบบ ตัวบ่งชี้เรโซแนนซ์แบบเฮเทอโรไดน์ เสนอโดย G. Gvozditsky ในวารสาร Radio, 1993, ฉบับที่ 1
ในการฝึกวิทยุสมัครเล่น ตัวบ่งชี้เรโซแนนซ์แบบเฮเทอโรไดน์ - GIR - มักใช้ในการวัดความถี่เรโซแนนซ์ของระบบการสั่นแบบพาสซีฟ โดยจะรวมเครื่องวัดคลื่นเรโซแนนซ์และเครื่องกำเนิดความถี่วิทยุที่ปรับเทียบพลังงานต่ำเข้าด้วยกัน อุปกรณ์ดังกล่าวประกอบด้วยวงจรการสั่นซึ่งประกอบด้วยตัวเหนี่ยวนำที่ปรับเทียบแล้วและตัวเก็บประจุแบบแปรผันมาตรฐานพร้อมกับสเกลไล่ระดับ หากระบบออสซิลโลสโคปเชื่อมต่อแบบเหนี่ยวนำกับวงจรของเครื่องวัดคลื่นและปรับความถี่เพื่อให้ได้แรงดันไฟฟ้าความถี่วิทยุสูงสุดในนั้นจากนั้นจากสเกลของเครื่องวัดคลื่นเราสามารถกำหนดความถี่เรโซแนนซ์ของระบบออสซิลเลเตอร์ภายใต้ การศึกษา วงจรออสซิลเลเตอร์ของเครื่องวัดคลื่น GIR นั้นเป็นวงจรของออสซิลเลเตอร์ในพื้นที่ในเวลาเดียวกัน การใช้อุปกรณ์วัดดังกล่าวทำให้ง่ายต่อการกำหนดความถี่เรโซแนนซ์ของวงจรออสซิลเลเตอร์ ส่วนของสายเชื่อมต่อ และองค์ประกอบเสาอากาศของสถานีวิทยุคลื่นสั้น จีอาร์, นอกจากนี้ยังสามารถใช้เป็นเครื่องกำเนิดสัญญาณได้อีกด้วย
GIR ของ Gvozditsky นั้นล้ำหน้ากว่าที่อธิบายไว้ในและมีคุณสมบัติที่สูงกว่า แม้ว่าเครื่องกำเนิดไฟฟ้าในทุกกรณีจะถูกสร้างขึ้นโดยใช้ทรานซิสเตอร์แบบ field-effect ซึ่งช่วยให้มั่นใจได้ถึงความเสถียรของความถี่ที่สูงกว่าเมื่อใช้ทรานซิสเตอร์แบบไบโพลาร์อย่างมีนัยสำคัญ
“แผนผังของ GIR ที่เสนอจะแสดงในรูปที่ 1 ออสซิลเลเตอร์เฉพาะที่ของมันทำจากทรานซิสเตอร์สนามผลเวอร์มอนต์ 1 เชื่อมต่อตามวงจรแหล่งทั่วไป ตัวต้านทานร 5 จำกัดกระแสเดรนของทรานซิสเตอร์เอฟเฟกต์สนาม ทำให้หายใจไม่ออกล 2 - องค์ประกอบการแยกออสซิลเลเตอร์ท้องถิ่นความถี่สูงจากแหล่งพลังงาน”
ไดโอด วีดี เลข 1 ซึ่งเชื่อมต่อกับเกทและขั้วต้นทางของทรานซิสเตอร์ ช่วยปรับปรุงรูปร่างของแรงดันไฟฟ้าที่สร้างขึ้น และทำให้ใกล้กับไซนัสซอยด์มากขึ้น หากไม่มีไดโอด กระแสครึ่งคลื่นบวกของกระแสเดรนจะบิดเบี้ยว เนื่องจากการเพิ่มขึ้นของทรานซิสเตอร์เมื่อแรงดันเกตเพิ่มขึ้น ซึ่งย่อมนำไปสู่การปรากฏตัวของฮาร์โมนิกในสเปกตรัมของสัญญาณออสซิลเลเตอร์ในพื้นที่อย่างหลีกเลี่ยงไม่ได้”
รูปที่ 1
แตกต่างจากรูปแบบที่กล่าวมาแล้วข้างต้นวงจรการสั่นของอุปกรณ์นั้นถูกสร้างขึ้นโดยขดลวดที่เปลี่ยนได้ล 1, ปลั๊กอินเอ็กซ์ 1 ซึ่งไม่มีพินกลาง ซึ่งทำให้การสลับทำได้ง่ายขึ้น “สลับ” อุปกรณ์ให้ทำงานในช่วงความถี่ที่ต้องการ เปิดคอยล์ล 1 ตัวเหนี่ยวนำที่สอดคล้องกัน ความแตกต่างของคอยล์ที่ทำบนเฟรม จากหลอดเก็บเลือดในห้องปฏิบัติการ, แสดงในภาพถ่าย (รูปที่ 2) และเลือกโดยนักวิทยุสมัครเล่นสำหรับช่วงที่ต้องการหรือดำเนินการตามคำแนะนำในแหล่งต้นฉบับ

รูปที่ 2
“ผ่านตัวเก็บประจุ C5 แรงดันไฟฟ้าความถี่วิทยุจะถูกส่งไปยังอินพุตของตัวบ่งชี้โวลต์มิเตอร์ความถี่สูงซึ่งประกอบด้วยเครื่องตรวจจับไดโอดวีดี 2 และวีดี 4 ซึ่งเชื่อมต่อกันตามวงจรแรงดันไฟฟ้าสองเท่าซึ่งเพิ่มความไวของตัวตรวจจับและความเสถียรของแอมพลิฟายเออร์ DC บนทรานซิสเตอร์เวอร์มอนต์ 2 โดยมีไมโครแอมมิเตอร์ PA1 อยู่ในเป้าหมายตัวรวบรวม ไดโอดวีดี 3 ทำให้แรงดันอ้างอิงบนไดโอดคงที่วีดี 2, วีดี 4 ตัวต้านทานแบบแปรผันร 3 รวมกับสวิตช์ไฟส A1 ให้ตั้งลูกศรไมโครแอมมิเตอร์ PA1 ไปที่ตำแหน่งเดิมที่เครื่องหมายสเกลขวาสุด…”
GIR ที่อธิบายไว้ไม่มีตัวปรับแรงดันไฟฟ้าเพิ่มเติมดังนั้นเมื่อใช้งานขอแนะนำให้ใช้แหล่งกำเนิดที่มีค่าแรงดันไฟฟ้ากระแสตรงเท่ากัน - จะเป็นแหล่งจ่ายไฟหลักที่มีแรงดันเอาต์พุตที่เสถียรอย่างเหมาะสมที่สุด
ลักษณะของอุปกรณ์และการติดตั้งชิ้นส่วนในตัวเครื่องแสดงไว้ในรูปที่ 1 3,4,5.

รูปที่ 3

รูปที่ 4

รูปที่ 5
ตัวเครื่องเป็นกล่องทองเหลืองชุบโครเมียม ขนาด 120x70x45 มม. มีฝาปิดมิดชิด (จากเดิม) เครื่องฆ่าเชื้อเข็มฉีดยาชนิด "บันทึก") (รูปที่ 3) ที่จับของบล็อกของตัวเก็บประจุแบบแปรผัน C1.1 - C1.2 อยู่ที่ผนังด้านหน้าของตัวเครื่อง บล็อก KPE ที่ใช้ใน GIR มาจากเครื่องรับวิทยุขนาดเล็ก “Alpinist” รูปร่างของกลไกขับเคลื่อนเวอร์เนียร์ช่วยให้คุณสามารถทำเครื่องหมายความถี่ในช่วงการวัดที่สอดคล้องกันด้วยดินสอผ่านรูบนแผ่นกระดาษ Whatman ที่ติดกาวไว้ที่ตัว GIR ใต้ด้ามจับของบล็อก KPI (รูปที่ 6)

รูปที่ 6
เป็นไปไม่ได้ที่จะสร้างมาตราส่วนร่วมเดียวสำหรับทุกช่วงเนื่องจากความซับซ้อนของงานดังกล่าว นอกจากนี้ความแม่นยำของสเกลผลลัพธ์ที่มีความหนาแน่นในการปรับแต่งที่แตกต่างกันของวงจรที่ใช้จะทำให้การใช้อุปกรณ์ยุ่งยากขึ้น
คอยล์ L 1 ชุบด้วยกาวอีพ็อกซี่หรือ HH88 ข้อมูลการพันของขดลวดจะถูกกำหนดโดยเชิงประจักษ์หรือตามคำแนะนำจาก สำหรับช่วง HF ขอแนะนำให้พันด้วยลวดทองแดงชุบเงินที่มีเส้นผ่านศูนย์กลาง 1.0 มม.
ตามโครงสร้าง คอยล์คอนทัวร์แต่ละอันจะถูกวางไว้บนฐานของขั้วต่อ SG-3 ทั่วไป มันถูกติดกาวเข้ากับโครงรอก
ที่ผนังด้านท้ายของตัวเรือนมีส่วนผสมพันธุ์ SSH-3 ซึ่งสอดหมุดของคอยล์รูปร่างเข้าไป (รูปที่ 7)

รูปที่ 7
คันเร่ง L 2 เป็นแบบสำเร็จรูปและประกอบด้วยโช้คประเภท DM0.1 สองตัวที่เชื่อมต่อแบบขนานกับค่าที่กำหนด 100 μH
ส่วนประกอบวิทยุที่เหลือที่ใช้นั้นสอดคล้องกับคำแนะนำในแหล่งที่มาดั้งเดิม
เครื่องหมาย “การสอบเทียบ” เฉพาะบนแผ่นมาตราส่วนของอุปกรณ์นั้นจะทำก่อนการวัด โดยใช้เครื่องรับที่มีมาตราส่วนดิจิทัล (หรือเครื่องวัดความถี่) เป็นต้น
“ หากจำเป็นต้องเพิ่มความแม่นยำของเครื่องชั่งในบางส่วนของช่วงให้เชื่อมต่อตัวเก็บประจุไมกาที่มีความจุคงที่ขนานกับขดลวด (รูปที่ 8)

รูปที่ 8
ความเหนี่ยวนำของขดลวดลูปและความจุของลูปโดยคำนึงถึงตัวเก็บประจุเพิ่มเติมสามารถคำนวณได้โดยใช้สูตร
LC =25330/ ตร.ม
โดยที่ C อยู่ในพิโกฟารัด L - ในไมโครเฮนรี, f - ในเมกะเฮิรตซ์
เมื่อพิจารณาความถี่เรโซแนนซ์ของวงจรที่กำลังศึกษา ให้นำขดลวด GIR เข้ามาใกล้ที่สุดเท่าที่จะเป็นไปได้ ค่อยๆ หมุนที่จับของบล็อก KPI และตรวจสอบการอ่านค่าตัวบ่งชี้ ทันทีที่ลูกศรแกว่งไปทางซ้าย ให้สังเกตตำแหน่งที่สอดคล้องกันของที่จับ KPI เมื่อหมุนปุ่มปรับเพิ่มเติม ลูกศรของแผงหน้าปัดจะกลับสู่ตำแหน่งเดิม เครื่องหมายบนสเกลที่สังเกต *การจุ่ม* สูงสุดของลูกศรจะสอดคล้องกับความถี่เรโซแนนซ์ของวงจรที่กำลังศึกษาอย่างแม่นยำ"
ย่อหน้าสี “ในเครื่องหมายคำพูด” - ข้อความต้นฉบับ
จากบทความโดย G. Gvozditsky ในนิตยสาร Radio
แหล่งที่มา:
1. ก. กวอซดิทสกี้ ตัวบ่งชี้เสียงสะท้อนของเฮเทอโรไดน์ - วิทยุ พ.ศ. 2536 ฉบับที่ 1 หน้า 36,37.
2. GIR ที่ 1.8-150 MHz . - Elektronisches Jarbuch 1988, หน้า 169..
3. วี. เดเมียนอฟ ปรับปรุง GIR - เว็บไซต์ของ N. Bolshakov ( RA 3 TOX) "พัดลมวิทยุ"
อุปกรณ์เรโซแนนซ์ (GIR) เป็นอุปกรณ์สากลความถี่สูงที่ง่ายที่สุดที่ช่วยให้คุณทำการวัดได้หลากหลายโดยอิงจากการใช้ปรากฏการณ์เรโซแนนซ์ GIR ช่วยให้คุณสามารถกำหนดความถี่ในการปรับแต่งของวงจรออสซิลเลเตอร์ที่ไม่สร้าง กำหนดค่าอุปกรณ์รับและส่งสัญญาณ วัดความถี่ออสซิลเลเตอร์เฉพาะที่ และดำเนินการวัดอื่นๆ อีกจำนวนหนึ่งด้วย
พื้นฐานของ GIR คือออสซิลเลเตอร์ในตัวเองกำลังต่ำที่ทำงานในช่วงความถี่ที่กำหนดและปรับให้สอดคล้องกับความถี่ของวงจรที่กำลังศึกษา ไมโครแอมมิเตอร์ของระบบแมกนีโตอิเล็กทริกมักใช้เป็นตัวบ่งชี้การสั่นพ้อง เอกสารฉบับนี้กล่าวถึง GIR สองตัวที่สร้างจากทรานซิสเตอร์
ในรูป รูปที่ 1 แสดงวงจร GIR ที่ง่ายที่สุดบนทรานซิสเตอร์ตัวเดียว ออสซิลเลเตอร์ในตัวถูกประกอบขึ้นตามวงจรที่มีฐานร่วมและคัปปลิ้งแบบคาปาซิทีฟ (ผ่านตัวเก็บประจุ C2) จำนวนของการแกว่งที่เกิดขึ้นถูกกำหนดโดยการเหนี่ยวนำของคอยล์ LI, L2 และความจุของตัวเก็บประจุแปรผัน C1 เพื่อให้ครอบคลุมความถี่ตั้งแต่ 5.8 ถึง 59 MHz และกำหนดความถี่การสั่นในระดับตัวเก็บประจุ C1 ด้วยความแม่นยำเพียงพอสำหรับการฝึกหัด ช่วงความถี่ข้างต้นจะแบ่งออกเป็นหกช่วงย่อย: 5.8 - 9; 7.2 - 11; 10 - 16.5; 16 - 27; 26 - 41 และ 37 - 59 MHz. การเลือกช่วงย่อยความถี่ทำได้โดยสวิตช์ B1 ซึ่งปิดส่วนหนึ่งของการหมุนของลูปคอยล์ L2 โหมดการทำงานของกระแสตรงของทรานซิสเตอร์ T1 ถูกกำหนดโดยตัวแบ่งแรงดันไฟฟ้าที่เกิดจากตัวต้านทาน Rl, R2
แรงดันไฟฟ้ากระแสสลับความถี่สูงคร่อมตัวต้านทาน R3 ซึ่งเป็นสัดส่วนกับแอมพลิจูดของการแกว่งความถี่สูงในวงจร จะจ่ายให้กับ D1 ผ่านตัวเก็บประจุ C5 ส่วนประกอบกระแสตรงในวงจรเครื่องตรวจจับวัดโดยไมโครแอมมิเตอร์ IP1 โดยมีกระแสเบี่ยงเบนรวม 50 - 100 μA ถ้าตัวเหนี่ยวนำ L1 ถูกนำมาใกล้กับวงจรออสซิลเลเตอร์ LC (แสดงในเส้นประในรูปที่ 1) ความถี่ที่ต้องวัด และตัวเก็บประจุแบบแปรผัน C1 จะทำให้ความถี่ของ GIR เท่ากับความถี่ธรรมชาติของ วงจร LC จากนั้นพลังงานความถี่สูงส่วนหนึ่งจากวงจร L1L2C1 จะถูก “ดูดออก” สิ่งนี้จะทำให้แรงดันไฟฟ้าความถี่สูงที่จ่ายให้กับเครื่องตรวจจับลดลง และทำให้การอ่านค่าในระดับไมโครแอมมิเตอร์ลดลง ดังนั้น หากสเกล GIR ถูกเปลี่ยนระดับไพโอกราดูเอตด้วยความถี่ ก็เป็นเรื่องง่ายที่จะระบุความถี่เรโซแนนซ์ของวงจร LC ควรคำนึงว่ายิ่งการเชื่อมต่อระหว่างคอยล์ L1 และ L อ่อนลง กระแสไฟฟ้าขั้นต่ำจะปรากฏคมชัดยิ่งขึ้นในช่วงเวลาของการสั่นพ้องในวงจรไมโครแอมมิเตอร์ ดังนั้นผลการวัดจะมีความแม่นยำมากขึ้น ไมโครแอมมิเตอร์สามารถเปลี่ยนได้ด้วยตัวต้านทานแบบแปรผัน R4
เมื่อสวิตช์ B2 เปิดอยู่ จะไม่มีการจ่ายไฟให้กับทรานซิสเตอร์ 77 และ GIR จะถูกแปลงเป็นการดูดกลืนเรโซแนนซ์ปกติ ในกรณีนี้ การปรับวงจร L1L2C1 ให้เป็นเสียงสะท้อนกับความถี่ของวงจรกำเนิด (วงจรออสซิลเลเตอร์ภายใน วงจรออสซิลเลเตอร์หลัก ฯลฯ) จะถูกตัดสินโดยกระแสสูงสุดในไมโครแอมมิเตอร์ ไมโครแอมมิเตอร์นี้จะวัดส่วนประกอบโดยตรงของกระแสในวงจรเครื่องตรวจจับเหมือนก่อนหน้านี้ซึ่งจ่ายแรงดันไฟฟ้าความถี่สูงจากวงจร L1L2C1 ผ่านตัวเก็บประจุ C2, C5, C4
GIR พร้อมด้วยแหล่งพลังงาน - แบตเตอรี่ " " ถูกวางไว้ในกล่องขนาด 50X75X130 มม. ทำจากดูราลูมินแผ่นนุ่มบาง
ตัวเหนี่ยวนำ L2 ถูกพันบนโครงโพลีสไตรีนที่มีเส้นผ่านศูนย์กลาง 19 และความยาว 40 มม. เฟรมประกอบด้วยลวด PEL 0.59 37 รอบพร้อมก๊อกจากรอบที่ 15, 23, 29 และ 33 นับจากด้านล่าง (ตามแผนภาพ) เอาต์พุตของคอยล์ ระยะพิทช์ของขดลวด 0.9 มม. ตัวเหนี่ยวนำ L1 ประกอบด้วยลวด PEL 1.35 หนึ่งรอบ ขนาดของมันแสดงไว้ในรูปที่. 2. มีการติดตั้งคอยล์ L1 ที่ส่วนปลายของตัวเรือน GIR และติดตั้ง L2 ไว้ภายในตัวเรือนให้ใกล้เคียงที่สุดเพื่อสลับ B1 เพื่อป้องกันความเสียหาย คอยล์ L1 จึงถูกหุ้มด้วยฝาทรงกระบอกที่ทำจากแก้วออร์แกนิก
ในรูป รูปที่ 3 แสดงหนึ่งในตัวเลือกการออกแบบที่เป็นไปได้สำหรับ GIR ดังกล่าว ตัวเก็บประจุที่มีอิเล็กทริกอากาศและความจุสูงสุดประมาณ 50 pF (C1), สวิตช์ชนิดบิสกิต (B1), สวิตช์สลับสองทาง (B2), ตัวเก็บประจุ KT (C2, C5), ตัวเก็บประจุ BM-2 ( ใช้ SZ, C4) , ตัวต้านทานผันแปร SPO-0.5 (R4), ตัวต้านทานคงที่ MLT-0.25 การปรับเปลี่ยน GIR จะดำเนินการหลังจากการติดตั้งเสร็จสิ้น และข้อผิดพลาดที่ระบุทั้งหมดจะถูกกำจัด เมื่อเชื่อมต่อพลังงานเข้ากับอุปกรณ์แล้ว ให้เลือกค่าของตัวต้านทาน Rl, R3 และตัวเก็บประจุ C2 เพื่อให้ออสซิลเลเตอร์ในตัวตื่นเต้นอย่างเสถียรภายในช่วงการทำงาน กระแสสะสมมักจะไม่เกิน 2 - 4 mA หากออสซิลเลเตอร์ในตัวทำงาน จากนั้นเมื่อเคลื่อนที่มอเตอร์ R4 ตัวต้านทานแบบแปรผัน การอ่านไมโครแอมมิเตอร์ควรเปลี่ยนได้อย่างราบรื่น
เมื่อตรวจสอบให้แน่ใจว่าออสซิลเลเตอร์ในตัวทำงานแล้ว เราจะดำเนินการต่อไปเพื่อกำหนดขีดจำกัดของย่านความถี่ย่อยแรก (37 - 59 MHz) และปรับเทียบสเกลของตัวเก็บประจุแบบแปรผัน C1 การดำเนินการนี้สามารถทำได้โดยใช้เครื่องวัดคลื่นเรโซแนนซ์ เครื่องกำเนิดสัญญาณมาตรฐาน หรือเครื่องกำเนิดสัญญาณ เครื่องรับวิทยุ ซึ่งออกแบบมาให้ทำงานในช่วงประมาณ 5 - 60 MHz
เมื่อใช้มิเตอร์วัดคลื่นเรโซแนนซ์ซึ่งนักวิทยุสมัครเล่นสามารถเข้าถึงได้มากที่สุด ขดลวดของเครื่องวัดจะควบคู่กับขดลวดแบบเหนี่ยวนำ ล1, ตัวเก็บประจุ ค1ตั้งค่าไปที่ตำแหน่งความจุสูงสุด เปิด GIR โดยใช้ปุ่มตัวต้านทานแบบปรับค่าได้ ร4 ตั้งเข็มไมโครแอมมิเตอร์ไปที่ตำแหน่งตรงกลาง และเปลี่ยนความถี่การปรับจูนของเครื่องวัดคลื่นเรโซแนนซ์ ปรับเป็นความถี่ GIR (ที่กระแสขั้นต่ำผ่านไมโครแอมมิเตอร์) ค่าความถี่นี้ถูกพล็อตตามสเกลของตัวเก็บประจุแบบแปรผัน ค1.ขีดจำกัดบนของความถี่ของย่านความถี่ย่อย I ถูกกำหนดที่ความจุขั้นต่ำของตัวเก็บประจุ ค1.
หากปรากฎว่าขอบเขตของช่วงย่อยแตกต่างอย่างมากจากค่าที่ต้องการให้เปลี่ยนความเหนี่ยวนำของขดลวด ล1 และทำการวัดซ้ำ การสอบเทียบสเกล GIR ภายในช่วงย่อยจะทำในลักษณะเดียวกัน โดยความถี่ของเครื่องวัดคลื่นเรโซแนนซ์ถูกตั้งค่าครั้งแรกที่ 0.5 - 1 MHz จากนั้น GIR จะถูกปรับให้เป็นความถี่เดียวกัน เมื่อเสร็จสิ้นการสอบเทียบวงดนตรีย่อย I แล้ว ใน 1กำหนดตำแหน่ง « ครั้งที่สอง» (26 - 41 MHz) และดำเนินการตั้งค่าขีดจำกัดและสอบเทียบมาตราส่วนในย่านความถี่ย่อย II หากจำเป็นต้องกำจัดการชดเชยความถี่ในแถบย่อย II คุณควรเลือกตำแหน่งของการบัดกรีก๊อกน้ำอย่างระมัดระวังมากขึ้น (จุด "ก")ถึงขดลวดหมุน ล2. ในช่วงย่อยต่อไปนี้ มีการระบุตำแหน่งสำหรับต๊าปบัดกรีจากรอบของคอยล์ L2 (จุด "ข", "ค", "ง")
ในระหว่างกระบวนการสอบเทียบอาจกลายเป็นว่าความกว้างของแต่ละช่วงย่อยจะแตกต่างจากค่าข้างต้น (เนื่องจากความจุเริ่มต้นของตัวเก็บประจุ C1,ความสามารถในการติดตั้ง ความจุของคอยล์เอง ล1, ล2). สิ่งนี้ควรได้รับการยอมรับ เนื่องจากในกรณีนี้ไม่มีองค์ประกอบสำหรับการปรับความถี่ที่จุดเริ่มต้นและจุดสิ้นสุดของช่วงย่อย สิ่งสำคัญคือความถี่ที่ต่ำกว่าของแถบย่อย I จะน้อยกว่าความถี่สูงสุดของแถบย่อย II เล็กน้อย ความถี่ที่ต่ำกว่าของแถบย่อย II น้อยกว่าความถี่สูงสุดของแถบย่อย III เป็นต้น
เมื่อสอบเทียบเสร็จแล้ว ขดลวดจะหมุน ล2 ขอแนะนำให้ติดไว้บนเฟรมในแต่ละจุดด้วยโพลีสไตรีนวานิชเพื่อป้องกันการกระจัดและการละเมิดการสำเร็จการศึกษา
โครงร่างของ GIR ที่ทันสมัยกว่าซึ่งมีโมดูเลเตอร์ (T2)และอุปกรณ์แสดงสถานะ (ทซ)แสดงในรูปที่. 4. GIR ดังกล่าวมีความสามารถในการวัดที่ดีกว่าและอนุญาตให้ใช้ตัวชี้ที่หยาบกว่า - ด้วยความไว 0.5 - 1
กระบวนการสอบเทียบไม่มีคุณสมบัติพิเศษใดๆ

มอสโก, สำนักพิมพ์ DOSAAF USSR, 1976 G-75792 ลงวันที่ 11/จิน-75 เอ็ดยังไม่มีข้อความ 2/743กแซ็ค.768
ตัวชี้วัดเฮเทอโรไดน์เรโซแนนซ์ (HIR) เป็นเครื่องมือวัดง่ายๆ ที่ออกแบบมาเพื่อตรวจจับและระบุเสียงสะท้อนในอุปกรณ์วิทยุอิเล็กทรอนิกส์ที่มีวงจรเรโซแนนซ์ โดยทั่วไป GIR จะเป็นกล่องขนาดเล็กที่ติดตั้งเครื่องกำเนิดการสั่นแบบไซน์ซอยด์ HS และมิเตอร์วัดปริมาณการใช้กระแสไฟหรือตัวบ่งชี้สัญญาณ RF แบบธรรมดา คอยล์เครื่องกำเนิดไฟฟ้าสามารถเปลี่ยนได้และติดตั้งบนบล็อก ตัวเก็บประจุแบบแปรผัน (อากาศหรือไมกา) มีสเกลที่ปรับเทียบแล้ว (สำหรับคอยล์ที่เปลี่ยนได้แต่ละอัน) ตามความถี่
หากคุณวางคอยล์ GIR ใกล้กับวงจรเรโซแนนซ์ จากนั้นเมื่อความถี่การปรับเครื่องกำเนิดไฟฟ้าเข้าใกล้ความถี่ของวงจร พลังงานของเครื่องกำเนิดไฟฟ้าจะเริ่มถูกดูดเข้าไปในวงจร สิ่งนี้สามารถสังเกตได้ชัดเจนแม้ว่าจะถอดคอยล์ GIR ออกจากวงจรในระยะหลายเซนติเมตรก็ตาม ในระหว่างการดูดกระแสไฟฟ้าที่เครื่องกำเนิดไฟฟ้าใช้จากแหล่งพลังงานจะเปลี่ยนไปซึ่งทำให้สามารถกำหนดช่วงเวลาของการสั่นพ้องได้
GIR ค่อนข้างเป็นอุปกรณ์ที่สะดวก โดยปกติแล้ว การใช้งานไม่จำเป็นต้องเชื่อมต่อกับวงจรที่กำลังทดสอบด้วยซ้ำ เมื่อทดสอบเครื่องรับวิทยุ สามารถประเมินความถี่การปรับจูนของวงจรอินพุต วงจรเครื่องขยายความถี่กลาง และวงจรออสซิลเลเตอร์ภายในได้ GIR มักใช้ในการกำหนดความถี่เรโซแนนซ์ของเสาอากาศ เช่น สถานีวิทยุคลื่นสั้น ตลอดจนความถี่เรโซแนนซ์ของตัวป้อนและส่วนของสายโคแอกเซียล
ในสหภาพโซเวียต อุปกรณ์ GIR-1 และ GIR-2 ได้รับการผลิตจำนวนมาก อย่างไรก็ตาม GIR ไม่ได้อยู่ในอุปกรณ์ระดับมืออาชีพเนื่องจากมีความแม่นยำในการวัดต่ำและมีอิทธิพลอย่างมากต่ออุปกรณ์ที่ทดสอบ อย่างไรก็ตาม GIR ถูกนำมาใช้กันอย่างแพร่หลายในการฝึกวิทยุสมัครเล่น คำอธิบายของอุปกรณ์ที่มีประโยชน์เหล่านี้สามารถพบได้ในวรรณกรรมวิทยุสมัครเล่น (เช่นในคอลเลกชันของนิตยสาร Radio) และบนอินเทอร์เน็ต
GIR อย่างง่ายบนทรานซิสเตอร์เอฟเฟกต์สนามเดียว
ในสารานุกรมสหภาพโซเวียตผู้ยิ่งใหญ่ มีการอธิบาย GIR ที่ใช้หลอดไตรโอด ทุกวันนี้การใช้ทรานซิสเตอร์แบบเอฟเฟกต์สนามจะสะดวกกว่ามาก ในรูป รูปที่ 1.59 แสดงไดอะแกรมของ GIR ที่ง่ายที่สุดบนทรานซิสเตอร์แบบฟิลด์เอฟเฟกต์ ซึ่งมักพบบนอินเทอร์เน็ต นี่คือวงจรอุปนัยสามจุดทั่วไป
ข้าว. 1.59. วงจรของ GIR ที่ง่ายที่สุดบนทรานซิสเตอร์เอฟเฟกต์สนาม
โครงสร้าง GIR นี้ติดตั้งอยู่ในกล่องโลหะขนาดเล็ก มีการติดตั้งอุปกรณ์ตัวบ่งชี้และตัวเก็บประจุแบบแปรผันพร้อมกับสเกลการตั้งค่าไว้ที่แผงด้านหน้า มีการติดตั้งตัวเชื่อมต่อที่ด้านข้างของตัวเรือนซึ่งเชื่อมต่อตัวเหนี่ยวนำ XI
เพื่อให้ครอบคลุมช่วง 25-40 MHz คอยล์มีพารามิเตอร์ต่อไปนี้: เส้นผ่านศูนย์กลางเฟรม 20 มม. ความยาวม้วน 30 มม. ขดลวดประกอบด้วยลวด PEV-2 9 รอบที่มีเส้นผ่านศูนย์กลาง 1.6 มม. พร้อมก๊อกจากวินาที เลี้ยว (นับจากด้านล่างสุดในแผนภาพ) เมื่อใช้ชุดคอยล์แบบเปลี่ยนได้ อุปกรณ์จะครอบคลุมช่วงความถี่ตั้งแต่ 3.0 ถึง 150 MHz GIR ใช้เพื่อกำหนดความถี่เรโซแนนซ์ของวงจร LC, เสาอากาศ และส่วนต่างๆ ของสายโคแอกเซียล ตามที่ระบุไว้การทำงานของอุปกรณ์ขึ้นอยู่กับการดูดซับพลังงานความถี่สูงโดยวงจรหรือเสาอากาศที่กำลังศึกษาในขณะที่ความถี่เรโซแนนซ์ของตัวเองและความถี่การปรับ GIR ตรงกัน ในขณะนี้ ค่าที่อ่านได้ของอุปกรณ์ตัวบ่งชี้มีการลดลงอย่างรวดเร็ว ความล้มเหลวนี้จะยิ่งใหญ่ขึ้นเมื่อการเชื่อมต่อระหว่าง GIR และวงจรออสซิลเลเตอร์แข็งแกร่งขึ้น และปัจจัยด้านคุณภาพของวงจรก็จะยิ่งสูงขึ้น
ในการวัดค่าเรโซแนนซ์อย่างแม่นยำ GIR จำเป็นต้องเชื่อมต่อแบบเหนี่ยวนำเข้ากับเสาอากาศที่จุดแอนติโนดปัจจุบัน ดังที่ทราบกันดีว่าแอนติโนดปัจจุบันจะอยู่ที่ระยะ 1/4 ความยาวคลื่นจากจุดสิ้นสุดของเครื่องสั่น GIR ควรมาถึงจุดนี้ โดยการเปลี่ยนความถี่การปรับแต่งของอุปกรณ์ให้ค้นหาการอ่านตัวบ่งชี้ขั้นต่ำและในขณะนี้อ่านความถี่ที่สอดคล้องกันจากสเกล ความถี่นี้เป็นความถี่เรโซแนนซ์ของเสาอากาศ ต้องจำไว้ว่าการแสดงเรโซแนนซ์เกิดขึ้นไม่เพียงแต่ที่ความถี่พื้นฐานเท่านั้น แต่ยังเกิดขึ้นที่ฮาร์โมนิคด้วย
หากความถี่เรโซแนนซ์ของเสาอากาศถูกวัดใกล้กับพื้น ความถี่ดังกล่าวจะเลื่อนไปทางความถี่ที่ต่ำกว่า เมื่อยกเสาอากาศขึ้นไปบนเสา ความถี่เรโซแนนซ์จะเลื่อนขึ้น 0.2-0.4 MHz เมื่อใช้ GIR คุณสามารถเลือกความยาวของสายโคแอกเชียลเพื่อทำงานในโหมดสายส่งที่กำหนดค่าไว้ (ความยาวไฟฟ้าของสายดังกล่าวเท่ากับจำนวนเต็มของครึ่งคลื่น) เมื่อต้องการทำเช่นนี้ ปลายด้านหนึ่งของสายเคเบิลลัดวงจร และ GIR ถูกนำไปที่อีกด้านหนึ่ง และเสียงสะท้อนจะถูกกำหนดใกล้กับความถี่ 27 MHz โดยการค่อยๆ ตัดสายเคเบิลให้สั้นลง จะทำให้ได้เสียงสะท้อนที่ความถี่กลางของช่วงที่ใช้
GIR บนอะนาล็อกทรานซิสเตอร์ของเนกาตรอน
แผนภาพที่น่าสนใจของ GIR แสดงไว้ใน (รูปที่ 1.60) ใช้ทรานซิสเตอร์อะนาล็อกของเนกาตรอนที่มีคุณสมบัติแรงดันไฟฟ้ากระแสรูปตัว A โดยอิงจากทรานซิสเตอร์สองขั้ว T1 และ T2 ด้วยเหตุนี้วงจรเครื่องกำเนิดไฟฟ้าจึงไม่ต้องใช้ก๊อกและวงจรป้อนกลับเชิงบวกแยกกัน เครื่องตรวจจับแรงดันไฟฟ้า RF ที่มีความไวสูงพร้อมตัวบ่งชี้หน้าปัดถูกสร้างขึ้นบนทรานซิสเตอร์เอฟเฟกต์สนาม TZ และเครื่องขยายสัญญาณในการปฏิบัติงาน

ข้าว. 1.60. GIR บนอะนาล็อกทรานซิสเตอร์ของเนกาตรอน
GIR นี้สามารถใช้เป็นตัวบ่งชี้การทำงานของเครื่องกำเนิดไฟฟ้าภายนอกและเป็นตัวบ่งชี้ปกติของการสั่นพ้องในวงจรเรโซแนนซ์แบบพาสซีฟ การใช้ตัวต้านทาน - โพเทนชิออมิเตอร์ P1 คุณสามารถตั้งค่าโหมดการขาดการสร้างหรือการมีอยู่ได้ ในกรณีที่ไม่มีเจนเนอเรชั่น อุปกรณ์จะตอบสนองต่อรังสี HF ภายนอก: หากความถี่การปรับจูนใกล้กับความถี่ของการแผ่รังสีนี้ การอ่านค่าตัวบ่งชี้จะเพิ่มขึ้น คุณยังสามารถตั้งค่าโหมดการสร้างซึ่งเข็มบ่งชี้เบี่ยงเบนตามจำนวนที่ระบุโดยการตั้งค่าโพเทนชิออมิเตอร์ P2 จากนั้น หากความถี่ของเครื่องกำเนิดไฟฟ้าเกิดขึ้นพร้อมกับความถี่ของวงจรเรโซแนนซ์ภายนอก การอ่านค่าตัวบ่งชี้จะลดลงเนื่องจากพลังงานถูกดูดจากเครื่องกำเนิดไฟฟ้าโดยวงจรภายนอก
ในคุณสามารถค้นหาข้อมูลสำหรับคอยล์ GIR ในช่วงความถี่ตั้งแต่ 1.3 ถึง 50 MHz มีการอธิบายตัวแปรของวงจรที่มีการมอดูเลตแอมพลิจูดของสัญญาณเครื่องกำเนิดไฟฟ้าด้วย วิธีนี้จะช่วยให้คุณระบุเสียงสะท้อนของโทรศัพท์ได้แม่นยำยิ่งขึ้น